Benchmarks
DiffTMM is validated for accuracy against the reference NumPy TMM library
(sbyrnes321/tmm, bundled as tmm_numpy/) and
benchmarked for performance (speed and GPU memory) against it. The scripts
live in the repository's benchmarks/ directory and each one regenerates the
figures below.
# from the repo root, with the benchmark extras installed
pip install -e ".[benchmarks]"
python benchmarks/1_compare_angle_response_isotropic.py # isotropic / SPR accuracy
python benchmarks/1_compare_angle_response_anisotropic.py # anisotropic 4x4 accuracy
python benchmarks/2_compare_speed.py # speed vs NumPy TMM
python benchmarks/3_compare_memory.py # GPU memory (2x2 vs 4x4)
python benchmarks/4_compare_incoherent.py # incoherent accuracy
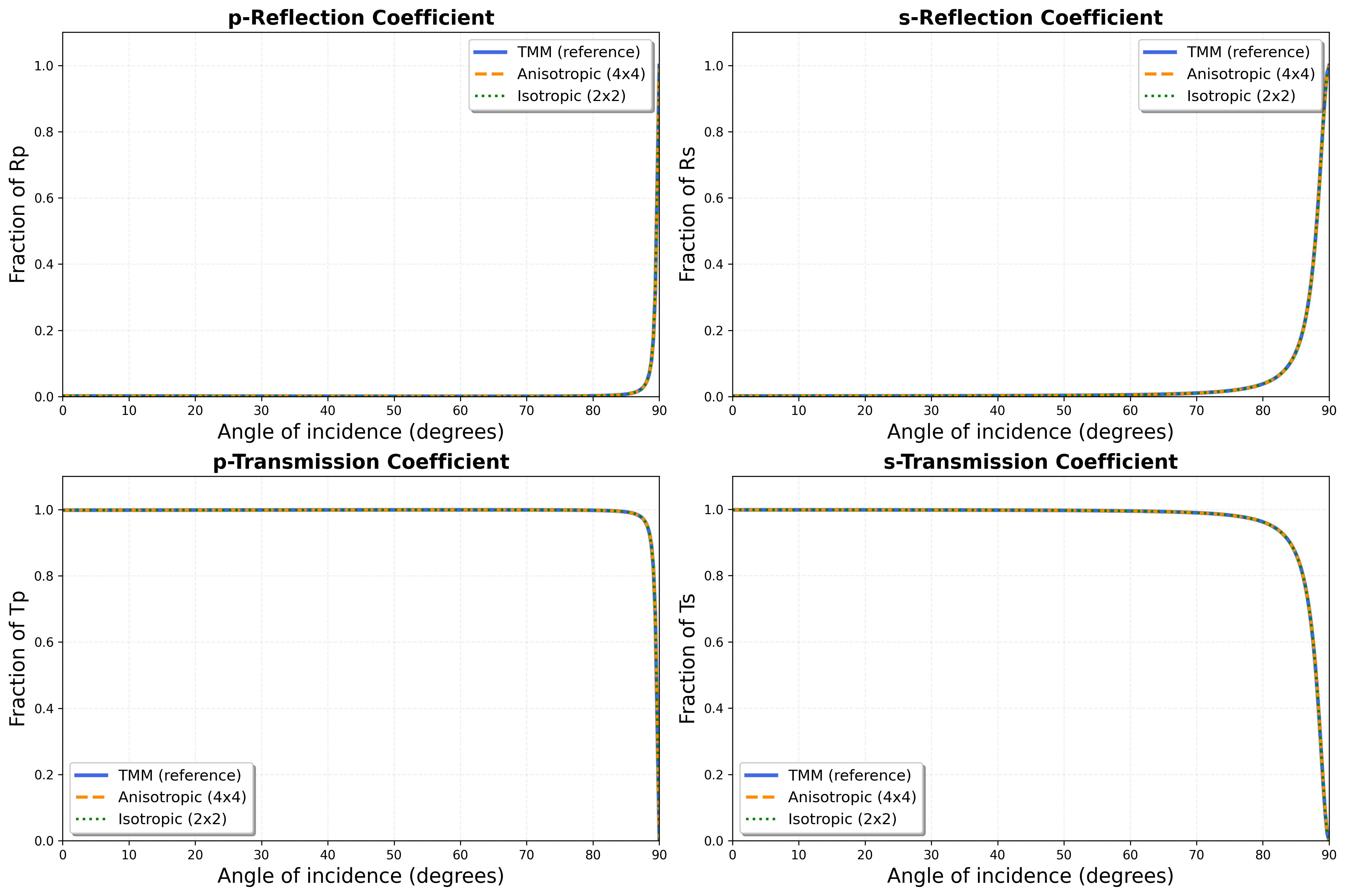
Accuracy
Isotropic & anisotropic vs. reference TMM
The Kretschmann surface-plasmon-resonance (SPR) configuration — a thin silver film
that produces a sharp angular reflection dip — is a demanding test case. DiffTMM's
2×2 isotropic and 4×4 anisotropic solvers both reproduce the reference NumPy TMM
coefficients (Rp, Rs, Tp, Ts) across the full angle range, with a maximum
error below 1e-4:
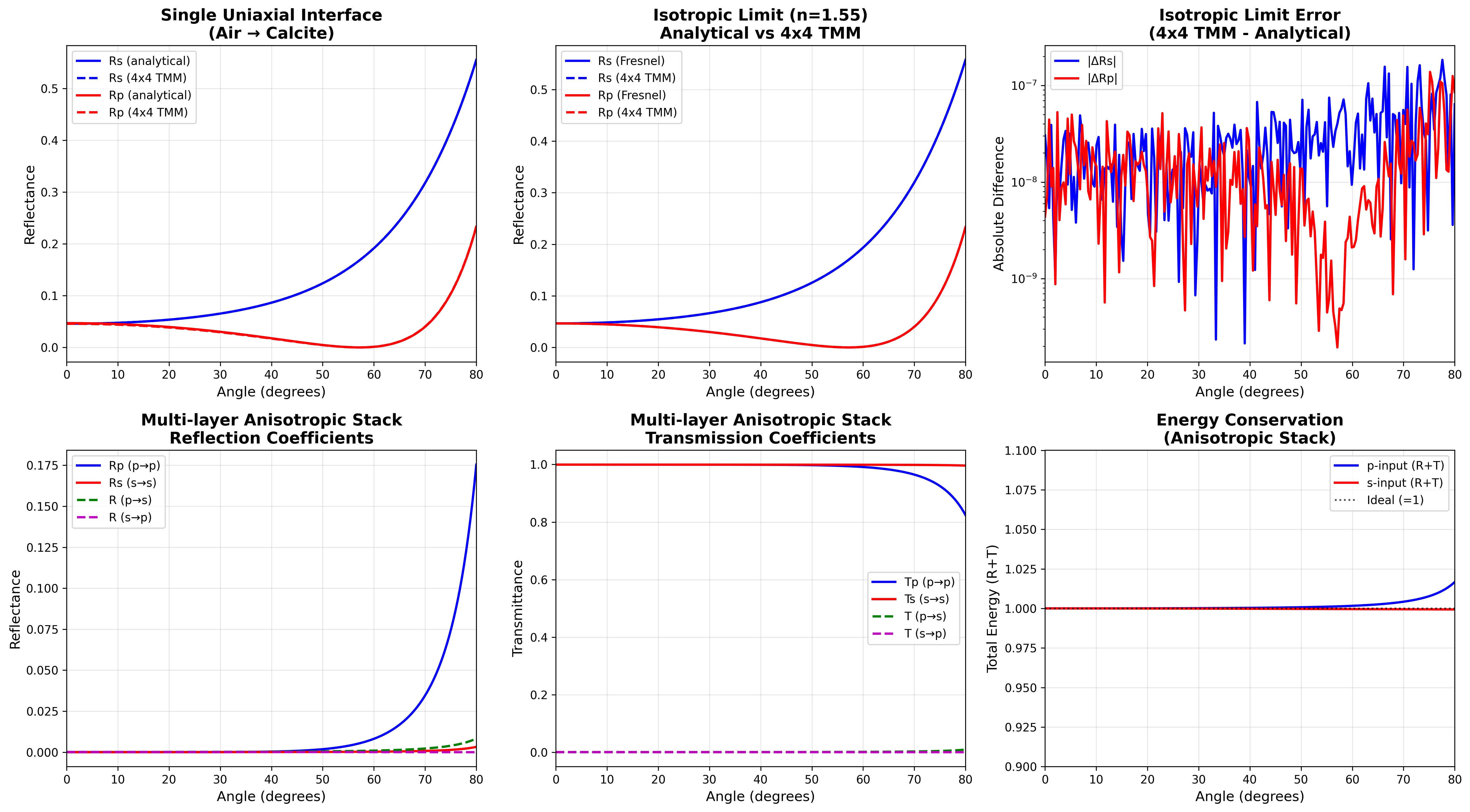
Anisotropic 4×4 validation
The general 4×4 solver is checked against analytical Fresnel equations in the
isotropic limit (error ~1e-7–1e-5), and for the physical properties expected
of a birefringent stack — energy conservation, cross-polarization coupling
(s→p, p→s), and reciprocity:
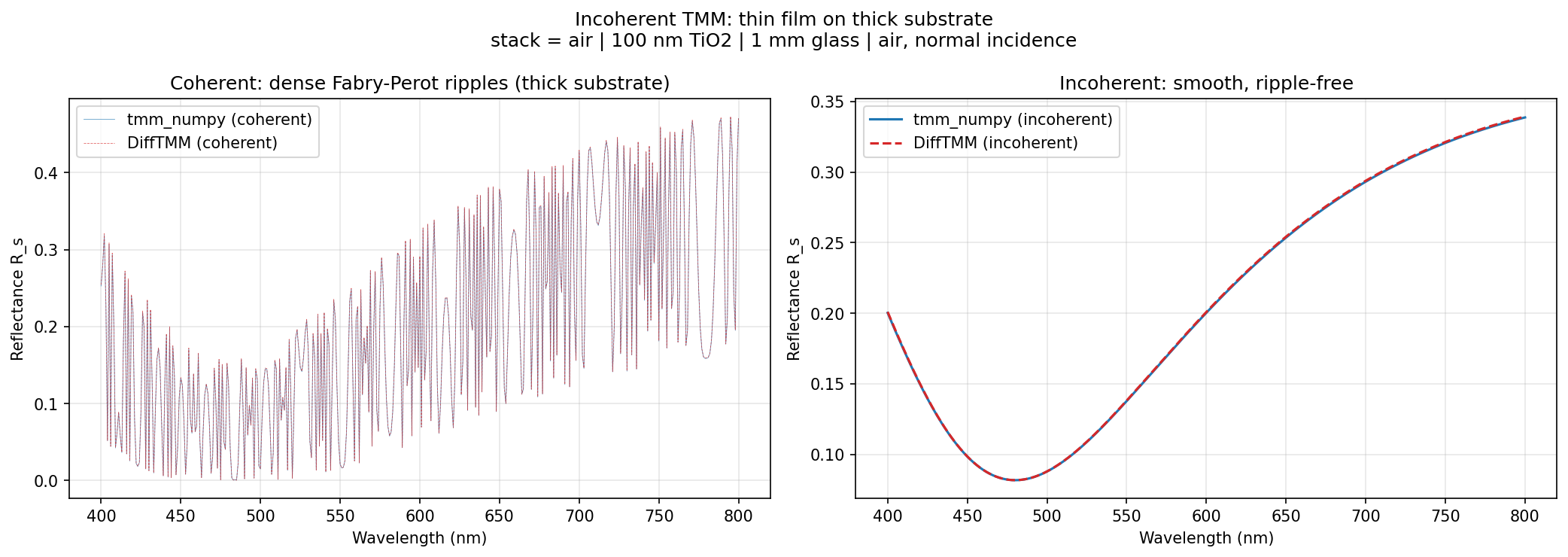
Incoherent solver validation
For a thin film on a thick (1 mm) substrate, the
IncoherentIsotropicFilmSolver matches tmm_numpy's
incoherent calculation — both the dense coherent Fabry–Perot ripples and the
smooth incoherent result agree:
Performance
Speed
Because DiffTMM is vectorized, it evaluates a whole batch of film stacks in parallel, while the NumPy reference processes them sequentially. At batch size 16, across stacks of 1–39 layers (100 angles, 633 nm), DiffTMM is roughly two orders of magnitude faster:
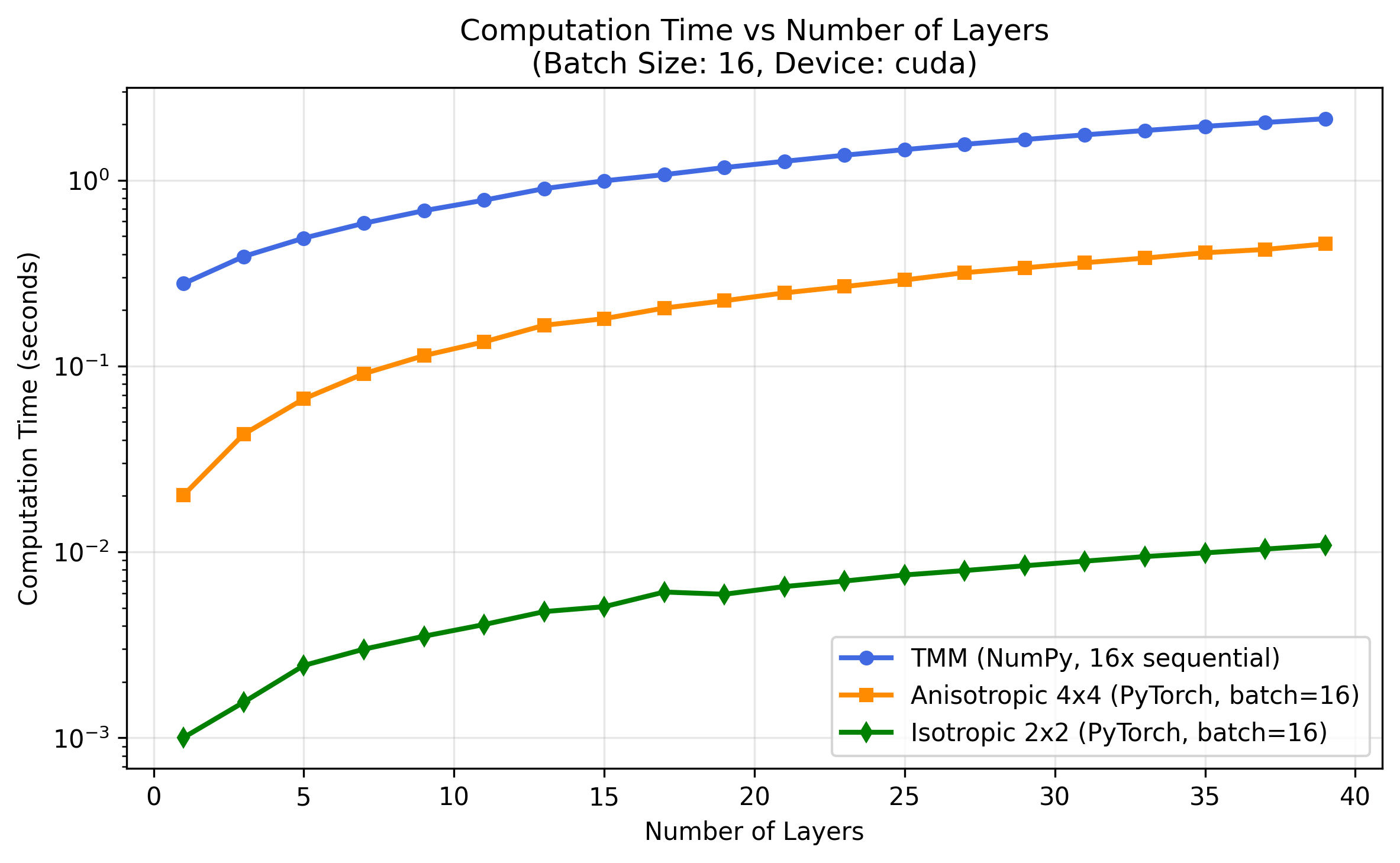
| Layers | TMM NumPy (s) | Anisotropic 4×4 (s) | Isotropic 2×2 (s) | Speedup (4×4) | Speedup (2×2) |
|---|---|---|---|---|---|
| 3 | 0.281 | 0.003 | 0.001 | 84× | 233× |
| 11 | 0.577 | 0.005 | 0.003 | 128× | 201× |
| 25 | 1.076 | 0.008 | 0.006 | 134× | 186× |
| 39 | 1.574 | 0.010 | 0.009 | 165× | 182× |
Measured at batch size 16 on an NVIDIA RTX 5090. The fast 2×2 isotropic solver reaches ~190× and the general 4×4 anisotropic solver ~134×.
GPU memory
For a differentiable training step (forward + backward), the 2×2 isotropic solver uses far less GPU memory than the general 4×4 solver — roughly 23× less — making it the better choice whenever every layer is isotropic. (The NumPy TMM reference is CPU-only, so it uses no GPU memory.)
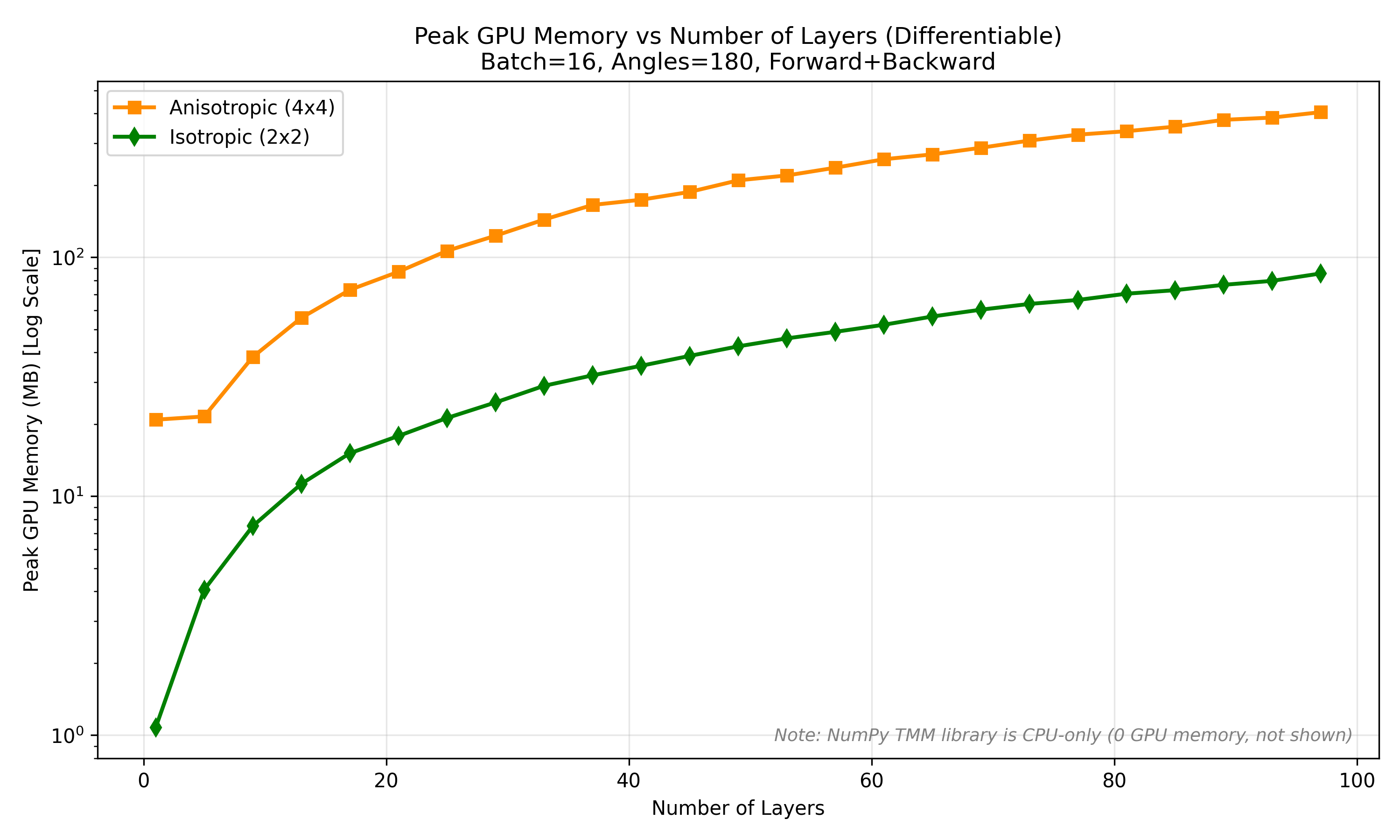
These results explain DiffTMM's solver guidance: reach for the isotropic 2×2 solver by default for its speed and low memory, and use the anisotropic 4×4 solver only when a layer is genuinely birefringent.